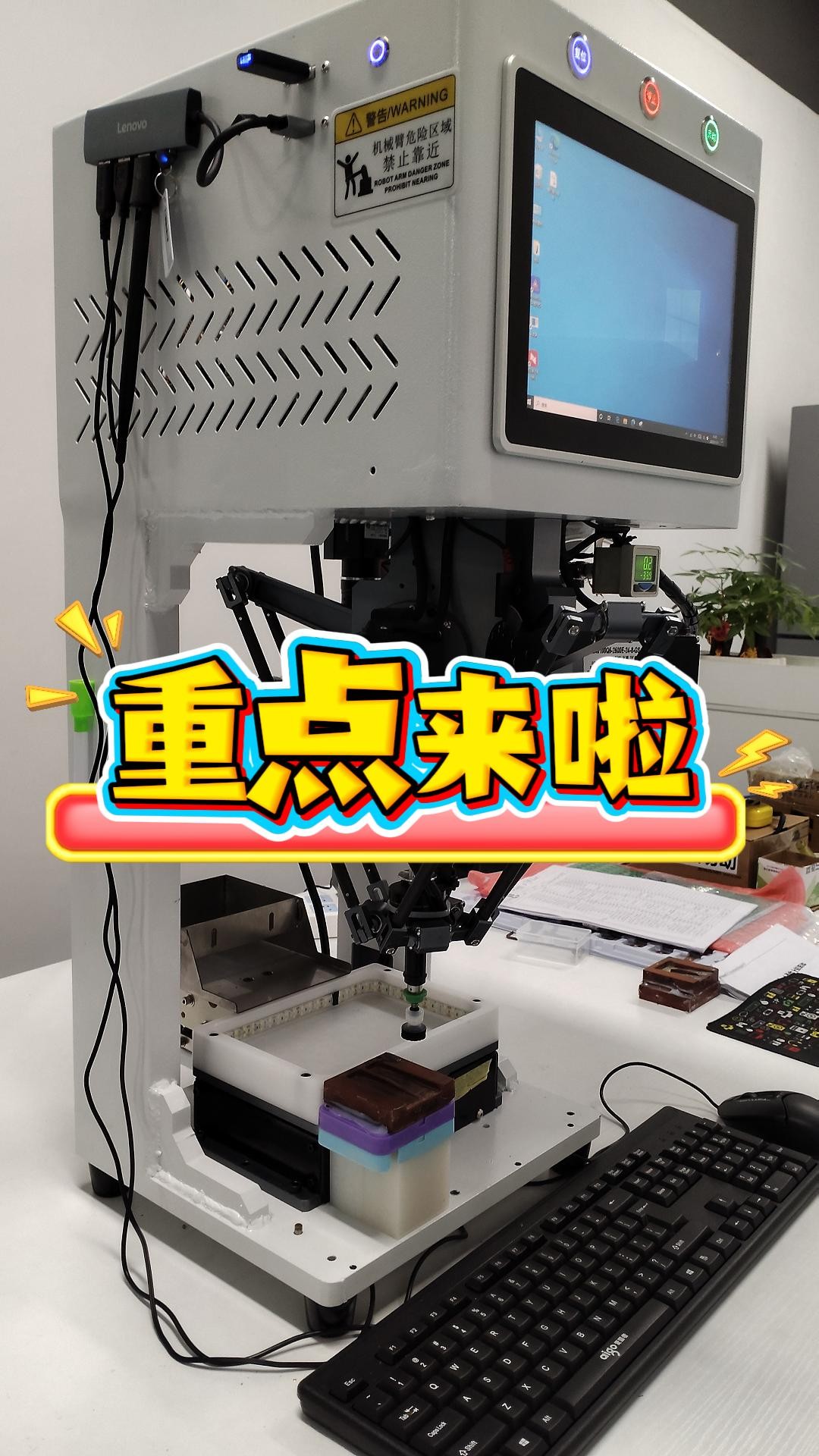
蜘蛛手机器人凭借并联结构、精准控制与智能感知,在自动化领域广泛应用。其核心由静平台、动平台和并联支链构成,支链通过伺服电机驱动,实现高速、高精度运动,避免误差累积。
运动控制依赖伺服系统与运动学算法。伺服电机精确控制关节角度,运动学模型通过正逆运算确定动平台轨迹,控制系统集成视觉、PLC逻辑,实现实时路径规划与多机协同,重复定位精度达±0.01mm,节拍超100次/分钟。
识别定位系统融合2D/3D视觉与AI算法。视觉传感器捕捉物品信息,AI深度学习区分种类并识别缺陷,力传感器实时反馈抓取力度,确保柔顺操作,适应不规则或易碎物品。
工作流程为:视觉识别物品位置→路径规划避障→精准抓取搬运→放置并反馈结果。各环节协同实现自动分拣、装盘等任务,如食品包装中快速定位饼干姿态,完成高效分拣。
其技术优势显著:高速高精度满足电子、食品行业需求;柔性适应多品种工件;抗干扰性强,适用于恶劣环境;结构紧凑节省空间,降低人工成本。例如,企业用6台机器人替代40人,一年回本,设备寿命超10年。
随着AI与5G技术发展,蜘蛛手机器人将更智能,推动汽车、医药等智能制造升级,成为工业自动化的核心装备。
微久智造蜘蛛手机器人
暂无评论